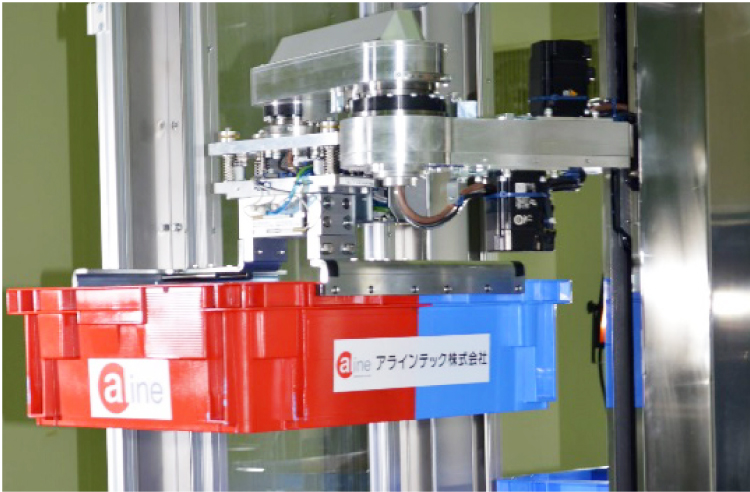
導入例①
RBとの連動で番重へのワークの移載も可能


独自開発 4軸ロボット搭載 番重・ケース段積み段バラシ用
番重・コンテナの上からの段積み・段バラシを高速省スペースで実現
ワークを食品などの搬送に用いられる番重(バンジュウ)や各種部品の搬送に用いられる小型コンテナなどのケースに詰める作業と、番重やコンテナを上から段積みする作業のロボットシステムです。
また、逆に入荷した番重(バンジュウ)・コンテナを段バラシして、ワークを取り出し、ラインへの投入に用いることもできます。
番重・コンテナへのワークの投入システムについては、ワークやラインの条件に合わせた対応が可能です。
番重ロボット 番重(バンジュウ)・小型コンテナ段積み段バラシロボットシステムの特徴
番重(バンジュウ)・小型コンテナの最上段からの段積み・段バラシを自動化
最上段に端数が入った番重・コンテナを置けるので、出荷数・納入数の確認が容易です。
積み上げられた空番重・空コンテナの最上段から1個ずつ取り出し、必要に応じて向きを変えて、ワーク詰込みエリアに置き、ワークを詰めたのち自動で段積みすることができます。
コンパクト設計で、狭い設置場所にも設置が可能です
フットプリント3㎡以下。番重を4か所に移載するレイアウトでも3㎡以下(最小1.5m×1.5m番重サイズによる)の省スペースで設置が可能です。
コンパクトな装置幅としているため、狭い場所への設置が可能です。
ドーリー台車などの台車2か所設置で連続段積み段バラシに対応
空の番重などのケースを台車で運び入れ、段積みが終わった番重などのケース台車を運び出しができるので連続した段積み段バラシが可能です。
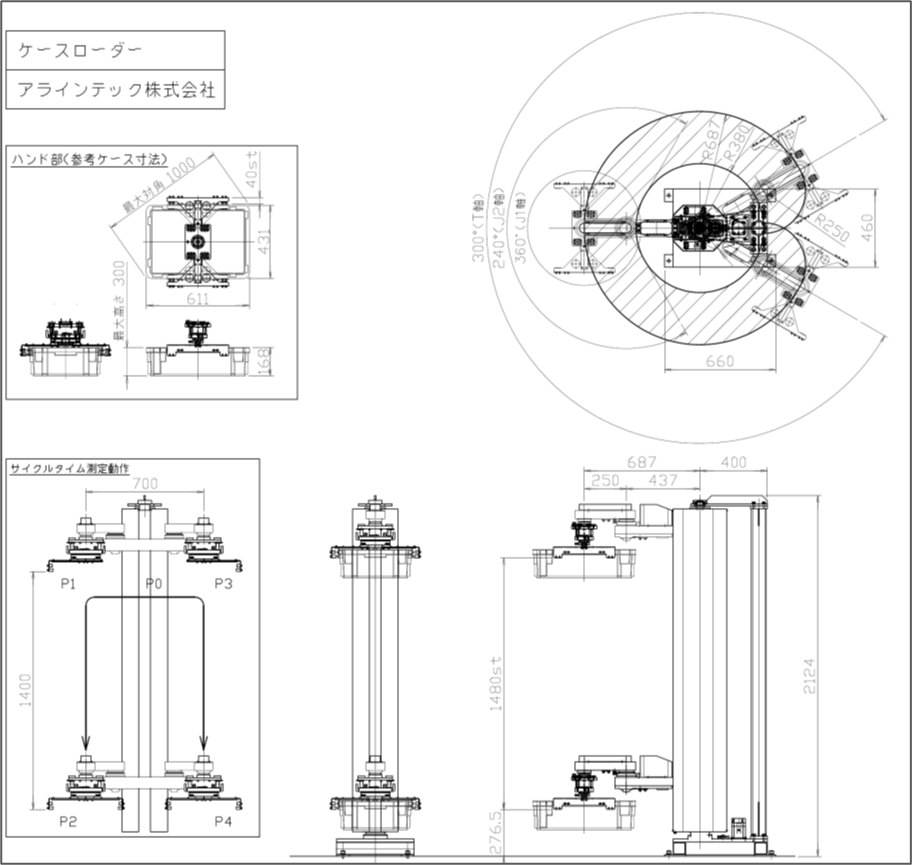
昇降ストロークは最大1.68mまで対応(AL-1700の場合)
自社開発の4軸ロボットは、これまでにない長いストロークの昇降動作を可能にしました。昇降ストローク最大1680mm(AL-1700)、1480mm(AL-1500)
なお、可搬重量15㎏の場合は、昇降ストロークを2.1mまで伸ばすことも可能です。仕様についてはご相談ください。
全高2.5m以下(全高2.5mは昇降ストローク1680mm仕様での装置全高です)
天井が低い場所でも、設置が可能です
高さを抑えた設計のため、低い天井高さでも多段の段積み段バラシが可能です。
上からの段積みですが、下からの段積みの場合と同程度の多段の段積みが可能です。
可搬重量20kg(AL-1500、AL-1700の場合)
充分な可搬重量により、さまざまな現場への適用が可能です。(重量は番重・ケースの重量と内容物の合計重量です)
最大可搬ケースサイズ
対角1000mm、高さ300mm
最大本体重量
300kg(AL-1700の場合)
移載時間7秒*の高速移載(AL-1500の場合)
段積みされた番重を所定の場所への切出し、所定の場所からの段積みを高速で移載します。(*AL-1500での、一般的な樹脂ケース、番重での移載時間です。ケースの形状や積み方により移載時間は異なります。自社開発の4軸ロボットで番重・小型コンテナを高速に搬送します。)自社開発の独自の4軸ロボットで、高速性とコンパクト性を両立させました。
掴みハンド付きで、自由度の高いレイアウトが可能
一般的な番重・ケースの掴みハンド付きで納入します。移載位置や向きを、アームの動作範囲内で任意に設定する事が可能です。
番重・小型コンテナへのロボットによるワーク詰込みや取り出しにも対応しています
高速タクトに対応した、自動詰込み自動取り出しが可能です。
様々なサイズの番重・小型コンテナに合わせた対応が可能です
導入前のシステム提案から設計、施工。
アフターサービスまで対応します
省スペースで設置が可能
汎用産業ロボットとの番重ロボットとの設置スペースの違い例。
なお、積上げ高さ、ケースの大きさにより面積は異なります。
 汎用産業用ロボット使用の場合 5㎡
汎用産業用ロボット使用の場合 5㎡
 番重ロボット使用の場合2.6㎡
番重ロボット使用の場合2.6㎡
面積48%削減(▲2.4㎡)
ケースローダーの用途例
●自動積込装置へのケース投入、回収
●作業者積み込み済みケースの自動段積み
●装置供給用ワーク入りケースの自動段バラシ
●ケース洗浄機への投入、回収
●ケース段積み順の自動入替え
●ケースの選別、仕分け
オプションでハンドの回転機構を設けることで空のケースを上下反転させることも可能です。ただし、可搬重量は下がります。
導入例①
RBとの連動で番重へのワークの移載も可能
導入例②
段違いのコンベアから平台車への段積み

導入例③
平台車供給と番重の段積み

導入例④
向け先毎への番重の段バラシ段積み

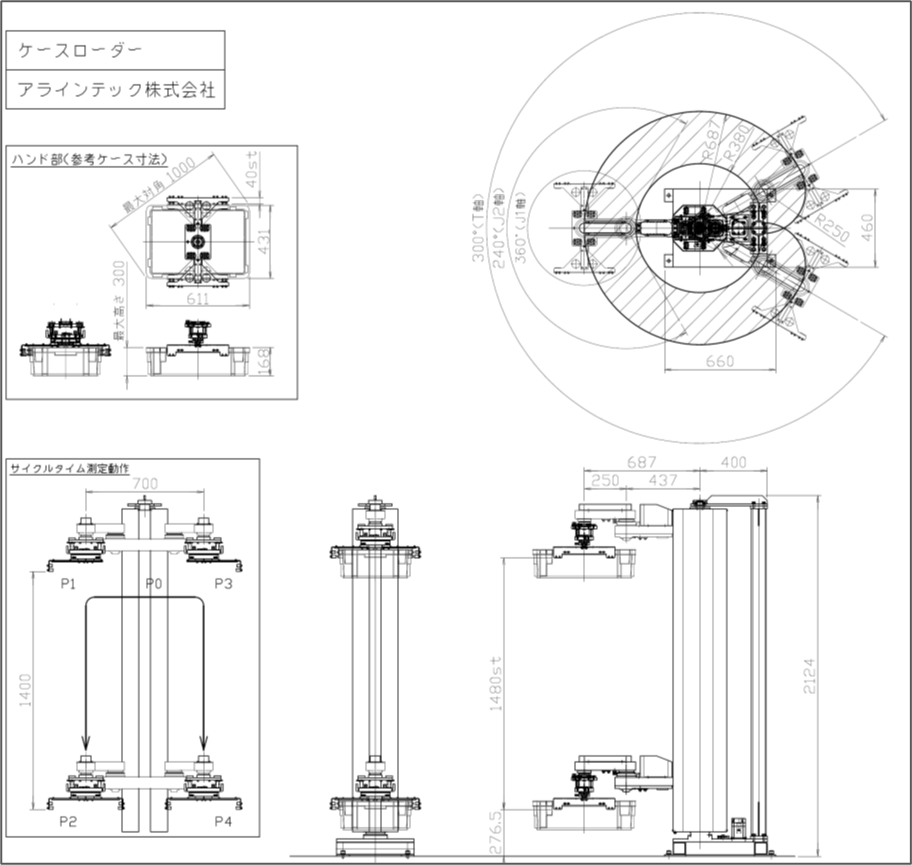
ケースローダーAL-1500
(昇降ストローク:1480mm)

ケース運搬台車(ドーリー台車など)に載せた状態で、装置へのセットが可能です。
空のケース台車を入れて、段積み完了したケースを運び出します。
段積み段バラシ装置
番重・小型コンテナ移載用4軸ロボット
ケースローダー外形寸法
アラインテックでは、ケースローダーALシリーズを組み合わせた各種自動化システムの製作が可能です。使用するケース・番重に合わせたハンド製作や、番重やケースへのワーク積み込みロボットを組み合わせたシステム製作等、最適なシステムをご提案致します。
番重(バンジュウ)・小型コンテナ
段積みロボットシステム 動画紹介
番重(バンジュウ)・小型コンテナ
段積みロボットシステム カタログ紹介


把持が難しいワークや、設置場所が狭いなど
難しい条件にも対応可能です
箱やケースに入った製品の出荷または梱包のためのパレタイジング(段積み)、入荷した段積みされた製品のデパレタイジング(段バラシ)によるラインへの投入を行います。
垂直多関節ロボットを用いているため、天井が低い場所などにも設置が可能です。
パレタイジングロボットシステムの特徴
垂直多関節ロボットを用いているので、天井が低い場合や、狭小スペースにも設置が可能です
把持が困難なケース・複数種類のケース等のあらゆる条件への対応が可能です
複数種類の積み付けパターンに対応します
規則的に積み上げられているワークの場合、多少ばらつきのあるワークのラインへの投入も可能です
ハンドを交換することにより、ワークをケースに詰める作業や、取り出す作業に用いることも可能です
パレタイジングロボットシステムの用途例
●コンベア上の段ボール・ケースのパレットへの積載
●パレット上に積み上げられた、段ボール・ケースの積み下ろし
●積み上げられたケースの積み下ろしと、ケースからの瓶などのワークの取り出し
●規則的に積み上げられたワークのラインへの投入
箱用パレタイジングシステム

一般的に使われるタイプです。
吸着式パレタイジングシステム(マルチサイズハンドタイプ)

箱のサイズ・個数が変わって吸着できない部分があっても運べます。
比較的軽量な箱の場合に使われます。
酒瓶デパレタイジングシステム

返却された酒瓶ケースをデパレタイジング(段バラシ)して、ケースから返却瓶を取り出し洗浄機への投入を行います。



{kind=link}