製造工程における、ワーク投入、搬送、加工、組立、検査、箱詰め、出荷などの工程のロボット化を行っています。単に人の作業をロボットに移行する場合でも、各種作業分析を行い、ロボットの行う作業と、専用の作業ユニットを用いる作業などに分けてシステムを構築します。ラインをロボット化・自動化する事により、様々なデジタルデータを取得することができるようになり(IoT化)、品質向上など様々な効果が期待できます。
製造工程以外にも、研究室や分析室における分析作業等様々な工程のロボット化も進めています。カメラや力覚センサーを用いた双腕ロボットシステムや協働ロボットシステムにも対応しています。
当社は、幅広い分野の業種での実績が豊富なため、様々なワークでの、各種作業環境・処理条件に対応が可能です。
ロボットシステムRobot system
製造業向けだけでなく
研究の自動化、建設業、農業など
幅広い産業に対応した自動化・ロボット化で、
御社の課題を解決します。

幅広い分野・業種において
あらゆる製品の製造工程を自動化
アラインテックの強みである幅広い分野・業種でのノウハウを基に、
ワーク投入、搬送、加工、組立、検査、箱詰め、出荷などを自動化。
様々な作業環境や処理条件にも対応することが可能です。
研究室・分析室などでの
分析用サンプル希釈作業や
微量調合作業を自動化
バラ積みワークの整列供給、
箱詰め作業を自動化
ロボットシステム
取扱説明書・シール等の
梱包作業を自動化
ロボットシステム

食品・雑貨のケース詰め、
ケースの段積み・段バラシ、
ライン供給を自動化
ロボットシステム

箱の積載・積み下ろし、
箱からのワーク取り出し、
ライン供給を自動化
ロボットシステム

苗植え替え機、
苗の植え替えを自動化
ロボットシステム
幅広い分野での
ロボットシステムに対応
当社では様々な分野のロボットシステムに取り組んでいます。
従来からの製造業だけではなく、建設業、農業、研究業務等のロボットシステムを手掛けています。
製造業においては、製造ラインにおけるワーク投入、加工、組立、検査、出荷など様々な工程のロボットシステムに対応しています。
製造業以外では、研究業務の液体と粉体の自動計量調合ロボットシステム、建設業でのビル鉄骨の移動溶接システム、農業における苗のポット植えシステム等様々な業界のロボットシステムを製作しています。
特に、生産ラインの自動化においては、ライン投入用として、ランダムに積まれた各種ワークのピッキング・整列ロボットシステムと、ライン出口での、ケース詰め、パレタイジングに関連する製品を展開しています。
当社は、従来ロボット化が進んでいなかった各種分野に取り組み、自動化・ロボット化を実現してきています。
ぜひ自動化・ロボット化についてご相談ください。
製造ラインロボットシステム
加工システム
溶接自動化システム
溶接、穴あけ、バリ取り、塗装など各種の加工工程の自動化を行います。
ハンドリング

ガラス基板ハンドリングシステム
移載、搬送、ピッキング、3Dランダムピッキング、ローダー等の各種のワークのハンドリング。
双腕ロボットシステム

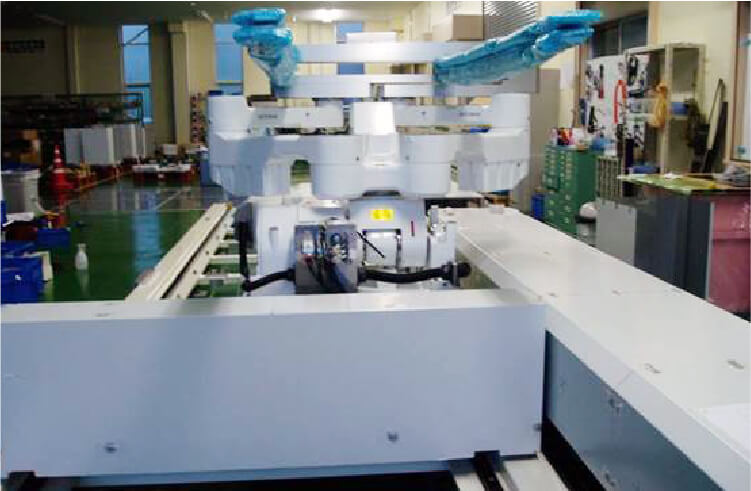
天吊型双腕ロボットシステム
2本の腕の協調動作により、多様な動作が可能です。視覚センサーや力覚センサー等を用いることにより、人間の職人技の自動化も可能です。
組立・検査

自動車部品組立システム
ワークの挿入、組み付け、ボルト締め、ねじ締め、嵌合など各種の組み立て作業の自動化を可能とします。
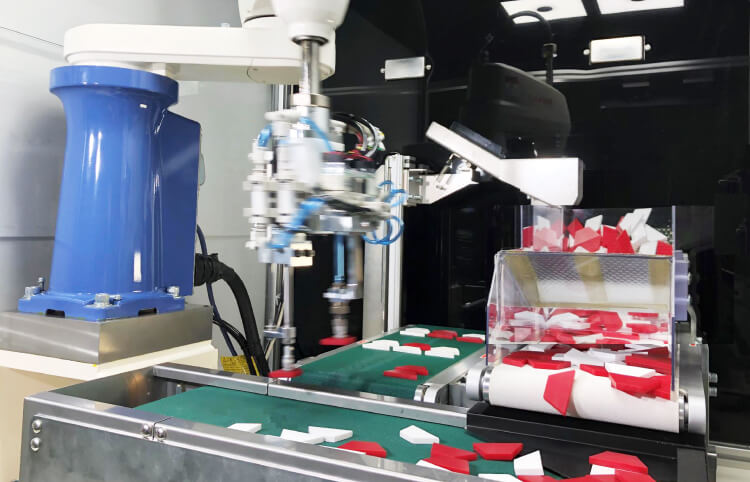
バラ積みピッキング・箱詰めロボットシステム
バラ積みワーク高速仕分けピッキング装置
バラ積みワークから、90個/分と高速ピッキング、整列供給を可能にしました。パーツフィーダーが使えないワークや、多種類のワークの供給が必要な場合等に最適です。ワークテストが可能ですので是非ご相談ください。
箱詰めロボットシステムの
詳細を見る
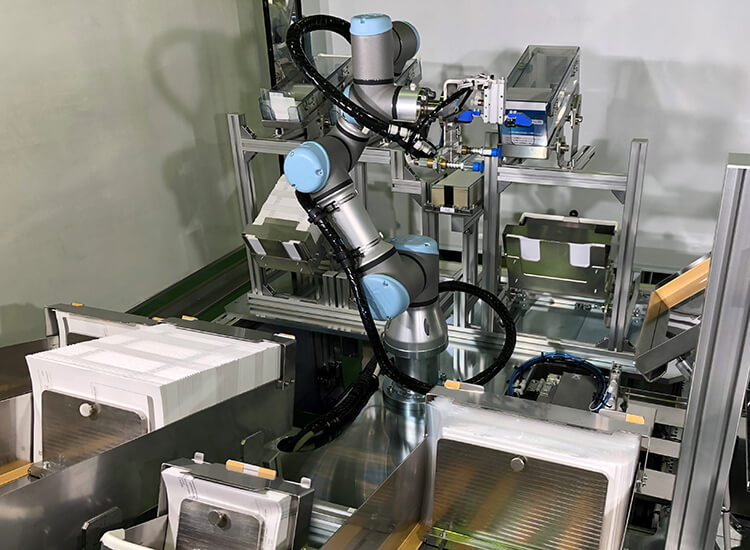
取説・シート類ピッキングケース詰めロボットシステム
製品の梱包作業や箱詰め、製品へのシール貼り作業等に必要な取説・シール・添付の小袋などの同梱資材をピッキングして、ケースに入れる作業を協働ロボットで行います。
出荷梱包作業での、1台ごとに必要な取扱説明書(取説)などのシート類を確実にケースに入れて同梱することができます。
出荷梱包作業での、1台ごとに必要な取扱説明書(取説)などのシート類を確実にケースに入れて同梱することができます。
ケース詰めロボットシステムの
詳細を見る
番重(バンジュウ)・小型コンテナ段積み、
パレタイジングロボットシステム
番重(バンジュウ)・小型コンテナ段積みロボットシステム
ワークを食品などの搬送に用いられる番重(バンジュウ)や各種部品の搬送に用いられる小型コンテナなどのケースに詰める作業と、番重やコンテナを上から段積みする作業のロボットシステムです。
パレタイジングロボットシステム
箱やケースに入った製品の出荷または梱包のためのパレタイジング(段積み)、入荷した段積みされた製品のデパレタイジング(段バラシ)によるラインへの投入を行います。
パレタイジングロボットシステムの
詳細を見る
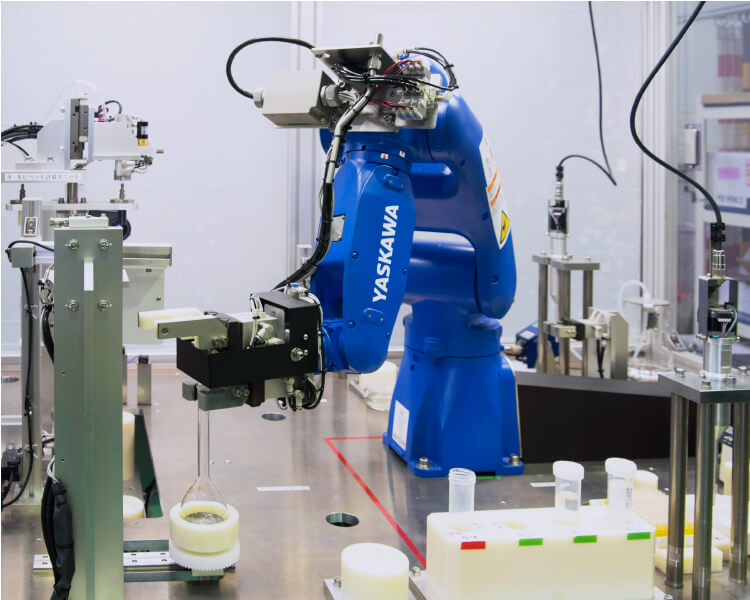
ラボ用ロボットシステム
ラボ用ロボットシステム
研究室・分析室などで行われるサンプル調整作業の中で、液体のガラス器具を用いた容積基準による希釈サンプル作成作業と、液体の重量基準による調合作業の自動化を実現しました。
詳細を見る

走行台車(スライダー)
ロボットの作業範囲を広げるために使われるのが走行台車です。2本のレールの上の台車にロボットを載せて、ロボットを移動させます。通常は、ロボットの外部軸として、ロボット制御盤でサーボモータを制御し、位置制御を行います。2台のロボットを協調させて移動させることもできます。当社は、大型ロボット用などの特殊走行台車を含め、各種の走行台車を製作しています。
ロングストローク走行台車

ロングストローク走行台車
(ストローク長30m)
通常の走行台車は、ケーブルベアの擦れなどのため、通常製作可能なストローク長は十数m程度までですが、当社は独自のノウハウにより、ロングストロークの走行台車を可能にしました。ストローク長30mまでの実績があります。ロボットを長距離移動させる必要がある場合にはご相談ください。
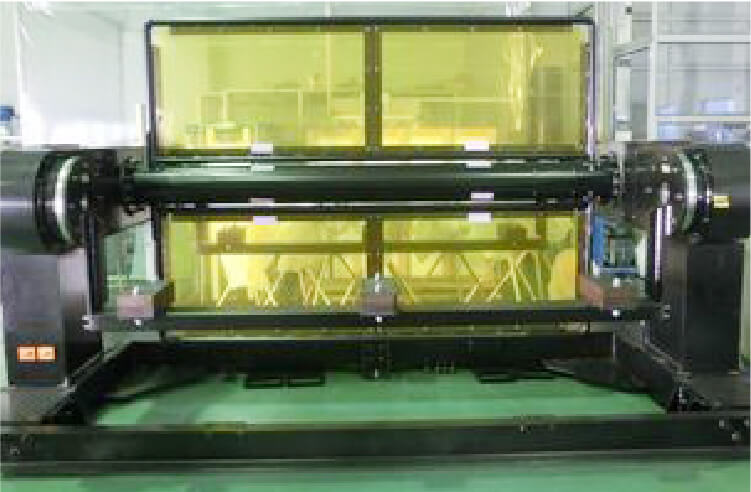
クリーン仕様走行台車

クリーン仕様走行台車
(ロボット2台仕様)
クリーンルームで使われる、発塵を抑えた走行台車です。
天吊型走行台車
上部の走行レールからロボットを逆立ちさせた状態で吊り下げて使用するための走行台車です。広い作業スペースを得るためや、地上に設置できるスペースの確保が難しい場合や、工作機械などの機器の上部を超えての搬送が必要な場合などに用いられます。
天吊型機械間搬送装置

天吊型双腕ロボットシステム
2軸走行台車

2軸走行台車
X,Yの2軸を持つ走行台車です。1台のロボットで広い平面内の作業を行うために用いられます。
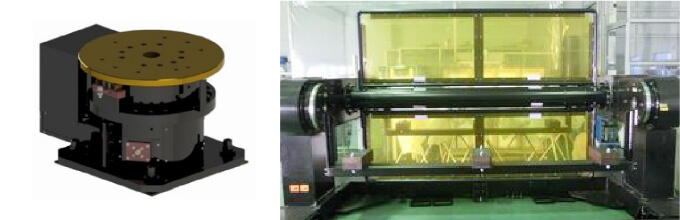
ポジショナー
溶接などのためにワークの姿勢を回転させ、ワーク姿勢を最適にするために使われる装置です。
ロボットの外部軸として、ロボットの制御盤から制御されるため精密に位置制御が可能です。
ロボットの外部軸として、ロボットの制御盤から制御されるため精密に位置制御が可能です。
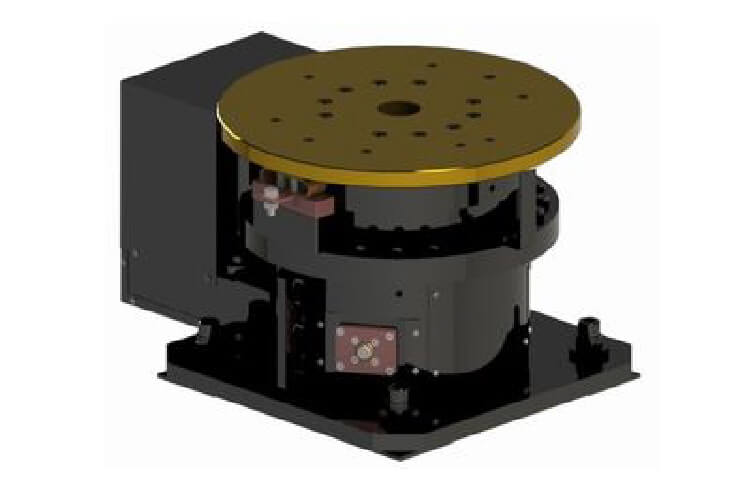
1軸ポジショナー
平面内で回転させるポジショナーです。縦型と横型があります。
1軸縦型ポジショナー

大型ワーク用1軸横型ポジショナー
(昇降式移載台付)
2軸ポジショナー
1軸ポジショナーを2台組み合わせて、平面内と垂直面内での回転を可能にしたものです。
3軸ポジショナー
3軸ポジショナー 垂直回転タイプ
(スパッター遮蔽板付)
1軸ポジショナー2台の位置を回転させて、1台で作業中に反対側でワークの着脱を行い、連続的に作業を行えるようにした装置です。水平回転タイプと垂直回転タイプがあります。